Reputedly, Einstein got the first inklings of his theory of Relativity at the age of sixteen when he asked himself what would happen if one were travelling at the speed of light (Note 1). This is exactly the sort of question an inquisitive adolescent asks himself and doubtless one which, at a slightly later date, the undergraduate coterie composed of Einstein, Besso, Grossmann and Mileva Maric (Einstein’s girl-friend and eventually first wife) debated earnestly in smoke-filled cafés in Zurich. Most people ‘grow up’ and put aside childish things, but Einstein not only continued puzzling over the apparent paradoxes involved in motion at or near the upper limit, but fleshed out his ideas into a testable mathematical theory.
Einstein ‘deduces’ the Lorentz Transformations ─ apparently without being familiar with Lorentz’s work ─ in his 1905 paper On the Electro-dynamics of Moving Particles but the paper makes rather heavy reading today. Later, in Appendix I to the ‘popular’ book Relativity, the Special and the General Theory (1916), he gives a much simpler derivation. These days, hardly anyone bothers about the reasoning involved : the Lorentz Transformations and related formulae must be right, or not very far from the truth, since otherwise a whole bunch of things that we know do work (like nuclear power stations) wouldn’t work. One doubts whether Einstein derived the formulae in the approved step by step logical fashion : he knew where he wanted to get to and worked backwards covering his tracks. This is the usual way important scientific and even mathematical discoveries are made : the rigorous deductive presentation is strictly “for the gallery”, or rather, for the editors of learned journals.
So where did Einstein want to get to? To the second of only two postulates on which the entire Theory of Special Relativity was based, namely that the observed speed of light in a vacuum is always the same irrespective of the relative movement of the source. Using the paraphernalia of co-ordinate Systems, this means that we must in some way make x′/t′ = c when x/t = c, with c constant.
Co-ordinate systems
To pinpoint a particular event we need to be able to answer the double question Where? and When? Traditionally we use a so-called co-ordinate system which, in the simplest case, may be conceived as composed of three directions emanating from a single point ─ an indefinitely expandable room with the bottom left-hand corner fixed as the ‘Origin’. An event occurring at a given time within this room can be located precisely by stating the distances along three axes at right angles to each other, the ‘length’, ‘depth’ and ‘height’ or in mathematics the x, y, z axes. But to specify not just the place but the time at which an event occurred we need a fourth co-ordinate t. A printed page is two-dimensional so we need to cheat a bit, retaining just a single spatial dimension and a single time dimension (Note 2). This simplification is less drastic than it may appear, since we are more often than not only concerned with a single spatial dimension.
A series of causally bonded events can be represented as a collection of dots on a Space/Time graph and if the relative displacement to the left (or right) at each ksana is the same, we get a straight line when we join up the dots. If the space/time displacement ratio is not constant, we do not get a straight line but some sort of ‘curve’. A ‘curve’ shows that we are dealing with an ‘irregular’ event-chain where the causal impulse that produces each next event fluctuates in some way, or the event-chain in question is subject to the influence of a second event-chain (or both possibilities at once). All this is familiar enough : it is the distinction between ‘rest or constant straight-line motion’ and ‘accelerated’ motion.
Einstein’s First Postulate of Special Relativity, that “the laws of
physics take the same form in all inertial frames” implies that a description of a series of events in terms of one particular coordinate system is ‘just as valid’ as a description of the same events in a different coordinate system, provided the second system is conceived as moving with constant velocity v relative to the first (which for simplicity we can consider to be stationary). All we need to do is make sure we ‘translate’ the specifications in one coordinate system into specifications in the second system in an intelligible and consistent manner (Note 3).
The occurrence, or not, of an event does not depend on coordinate systems
It is absolutely essential to grasp (or rather accept) that the occurrence or not of an event, either in UET or in matter-based physics, has absolutely nothing at all to do with coordinate systems or such like man-made constructions. An event either occurs or it does not occur, and if it does occur, it occurs at a specific spot ─ these are all part of the preliminary assumptions of UET. In principle, much the same applies even in ‘traditional’ physics ─ leaving aside for the moment complications introduced by Quantum Mechanics ─ though textbooks tend to be rather evasive on this point.
Whatever coordinate system or other localization method we are using, we need to make sure that we always home in on the same exact spot where such and such an event occurred, or could have occurred. A ‘moving body’ is really a succession of point-like events, but we humans don’t perceive it as such; Einstein’s First Postulate means that, amongst other things, the trajectory or ‘event-line’ of such a (pseudo) body should be the same no matter what localization method we employ. Transferring from one system to another is not too difficult post-Descartes and a very useful trick is to choose two coordinate systems, one ‘moving’ with respect to the other, in such a way that the ‘direction of motion’ of the ‘body’ we are interested in coincides with the x (and the x′) axis (Note 3)
Redundancy of two spatial axes
What about the other two spatial axes? They are treated as irrelevant since, by hypothesis, nothing is going on in those directions and so we can simply make y′ = y z′ = z. This just leaves x′ and t′ to bother about.
‘Motion’ is a ‘function of time’ : at different moments ‘in time’ a ‘moving’ body will be at different places. Moreover, in the general case, motion is only a function of time. We do not, for example, usually need to consider things like temperature or air pressure when we are studying motion : if they make a difference this will show up in the equations anyway. On the other hand,since we are dealing with the general case of steady straight-line motion, we need a ‘parametric constant’ v. By ’parametric constant’ I mean a quantity that in any particular set-up does not change but which can and does change in a different set-up. Such a quantity is somewhat in-between a true variable and a true constant : logically speaking the notion is quite subtle but, surprisingly, we find it natural enough which suggests that the brain uses a similar procedure ‘unconsciously’.
Expected form of Transformation formulae
Mathematically, the above brief discussion means that, algebraically, we would expect the ‘transformed formulae’ x′ and t′ to be expressions in x and t only apart from certain constants and the ‘parametric constant’ v. Moreover, without going into too much detail for the moment (Note 4), we expect both x′ and t′ to be ‘linear’ functions of x and t, i.e. they will not contain powers higher than the first. So we are looking for expressions such as
x′ = Ax – Bt + C1 t′ = Cx – Dt + C2
where A, B, C, D are either pure constants or involve v.
If we make the two origins coincide at a certain moment in time, we can eliminate the two constants C1 and C2 which makes things easier still.
Now, the simplest ‘transformation’ is simply to ‘add on’ (or ‘take away’) the distance the ‘moving’ frame ∑′ has travelled in t seconds, namely a distance of vt metres (or some other unit of length). If the particular spot where an event occurs is, say, d metres from the origin of ∑ and the event keeps on occurring at the ‘same’ spot this distance d from the origin of the ‘stationary’ frame ∑ remains the same. But if ∑′ is moving at a rate of v metres/second this original distance d will decrease in ∑′ by such and such an amount every second. This gives x′ = x – vt where in effect we are making a = 1, B = v C1 = 0 in the equation x′ = Ax – Bt + C1 .
We leave aside the t′ co-ordinate for the moment.
Upper Limit the speed of light
Now, according to traditional electro-magnetic theory light (and all other electro-magnetic radiation such as radio waves, X-rays and so on) travels at a constant speed c. So there are particular values for x and t when x/t = c. Call one pair xc and tc .
So, we have xc /tc = c. According to Einstein’s Second Postulate, whenever we get xc /tc = c we must get xc′ /tc′ = c . Now, this is impossible using the Galilean Transformations x′ = x – vt t′ = t becausewe obtain for specific values xc and tc (where xc /tc = c)
xc′ /tc′ = (xc – vtc)/tc = (xc /tc ) – (vtc)/tc = c – v
But xc′ /tc′ does not equal (c – v) except when except when v = 0. And we don’t need all the paraphernalia of Galilean or Lorentz Transformations to conclude that when there is no relative movement between two co-ordinate systems (expandable boxes) the distances from the corner to where the event occurred are going to be the same.
Obvious though this sounds today, it led Einstein and one or two other people at the time, to seriously entertain the possibility that both time and distance change when there is relative motion between the systems that Einstein calls ‘inertial frames’. So ‘time is not always the same time’ and ‘distance is not always the same distance’ as Newton for one certainly believed.
Stopping the limit being exceeded
So are there any possible ways of tampering with the equations but keeping the general pattern
x′ = Ax – Bt t′ = Cx – Dt
while, miraculously, obtaining x′ /t′ = c whenever x/t = c ?
The answer is, yes.
If we use the Transformation Formulae
x′ = γ (x – vt) y′ = y z′ = z t′ = γ(t – vx/c2)
where γ is a constant independent of x and t, it all comes out right.
The proof, or rather verification of the claim, is as follows. Remember that we are concerned for the moment only with those values of x and t for which the distance/time ratio is c ─ for example when x is a little less than 108 metres and t is one second.
x/t = c makes x = ct and t = x/c for these values of x and t and we can legitimately replace any of the above by their equivalents.
So, assuming these Transformation Rules, and x/t = c
x’/t’ = γ (x – vt)/γ(t – vx/c2) = (x – vt)/(t – vx/c2) = c2(x – vt)/ (c2t – vx)
= c2x – c2vt)/(c2t – vx) = c2x – cv(ct)/ (c(ct) – vx)
= c2x – cvx)/ (cx – vx) (using ct = x)
= (cx)(c – v)/x(c – v)
= c
= x/t
The Einstein/Lorentz Transformations
But the Transformations
x′ = γ (x – vt) y′ = y z′ = z t′ = γ(t – vx/c2)
would work for any constant value of γ provided it is independent of x and t. If, now, we make
γ = c /√(c2 – v2) = 1/√1 –(v2/c2)
we get some extra spin-offs.
The Einstein/Lorentz Transformations then have the following four very desirable features:
1. Whenever x/t = c x′ /t′ = c or, as it is more frequently expressed n textbooks, whenever
(x2 + y2 + z2)/t2 = c2 (x′2 + y′2 + z′2)/t′2 = c2
This is in line with Einstein’s 2nd Special Relativity Postulate.
2. They are linear in x and t, i.e. they don’t involve more complicated functions such as t2, sin t, ex and so forth.
3. They reduce to the normal Galilean Transformations as v/c → 0 , thus explaining why we don’t need them when the speeds we are dealing with are much smaller than c.
4. The factor γ = 1/√1 –(v2/c2) ‘blows up’ as v gets closer and closer to c which Einstein interprets as demonstrating that no ‘ordinary’ particle or causal physical process can actually attain c, the only exception being light itself. c thus functions as an upper limit to the transfer of energy and/or information (Note 4).
The Time Transformation in UET
So, how does this go over into UET? Not very well, actually. I have had more trouble over this point than any single aspect of the theory since I first sketched it out some thirty-five years ago.
To start with, I am not so much concerned in transforming from one coordinate system to another ─ essential though it is to be able to do this for practical purposes. l wish rather to concentrate attention on individual ‘Event Capsules’ and causally connected sequences of (more or less) identical Event Capsules, i.e. event-chains. Coordinate systems don’t exist in Nature but I believe that ‘event capsules’, or something very much like them, do.
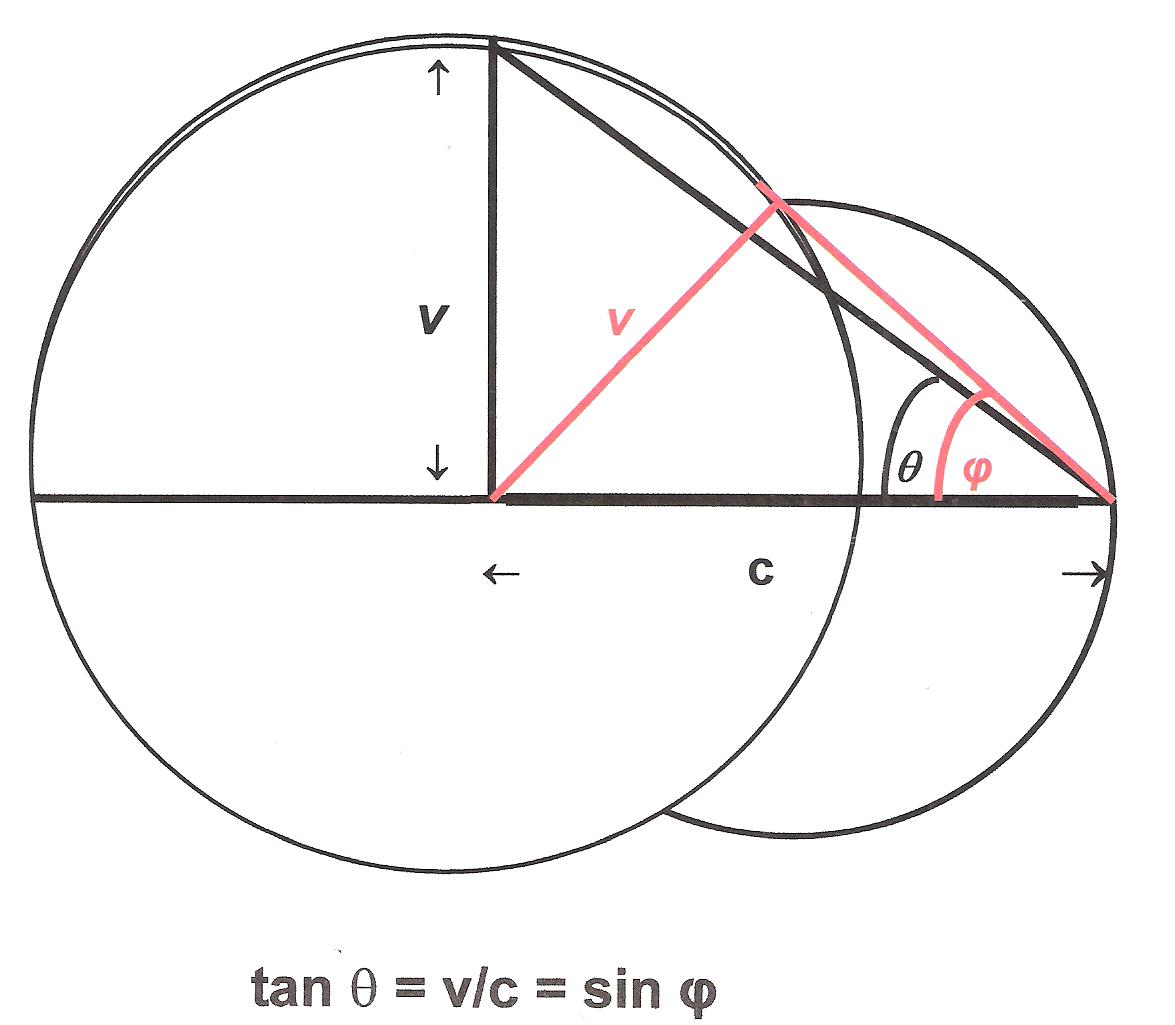
I also prefer a more visual, geometric approach (while recognizing its limitations) and thus opt for expressions like
sin φ = v/c and cos φ = √1 – sin 2 φ) which makes γ = 1/cos φ. But this is not a big deal : certain more approachable textbooks on Relativity do employ diagrams and use trigonometrical aids.
Now, in principle, I should be able to derive the basic formulae of Special Relativity from strictly UET premises. Can I actually do this and if not, why not?
Principle of Constant Occupied Area and its consequences
The equivalent of Einstein’s first postulate (“that the laws of physics take the same form in all inertial frames”) is the so-called Principle of the Constancy of the ‘Occupied Area’.
In UET, though there is change, there is no such thing as continuous motion. This means that dynamical problems tend to reduce to problems of statics. Two successive causally bonded ultimate events are envisaged as constituting ‘Event Capsules’ (more strictly ‘Transitional Event Capsules’) and Einstein’s ‘Principle of Relativity’ in effect means that the actual dimensions of a specific Transitional Event Capsule are unimportant provided it contains, or could contain, the same event or events. The ‘occupied area’ of the Event Locality remains the same because the spatial and temporal dimensions are inversely proportional : roughly, if space contracts, time must expand.
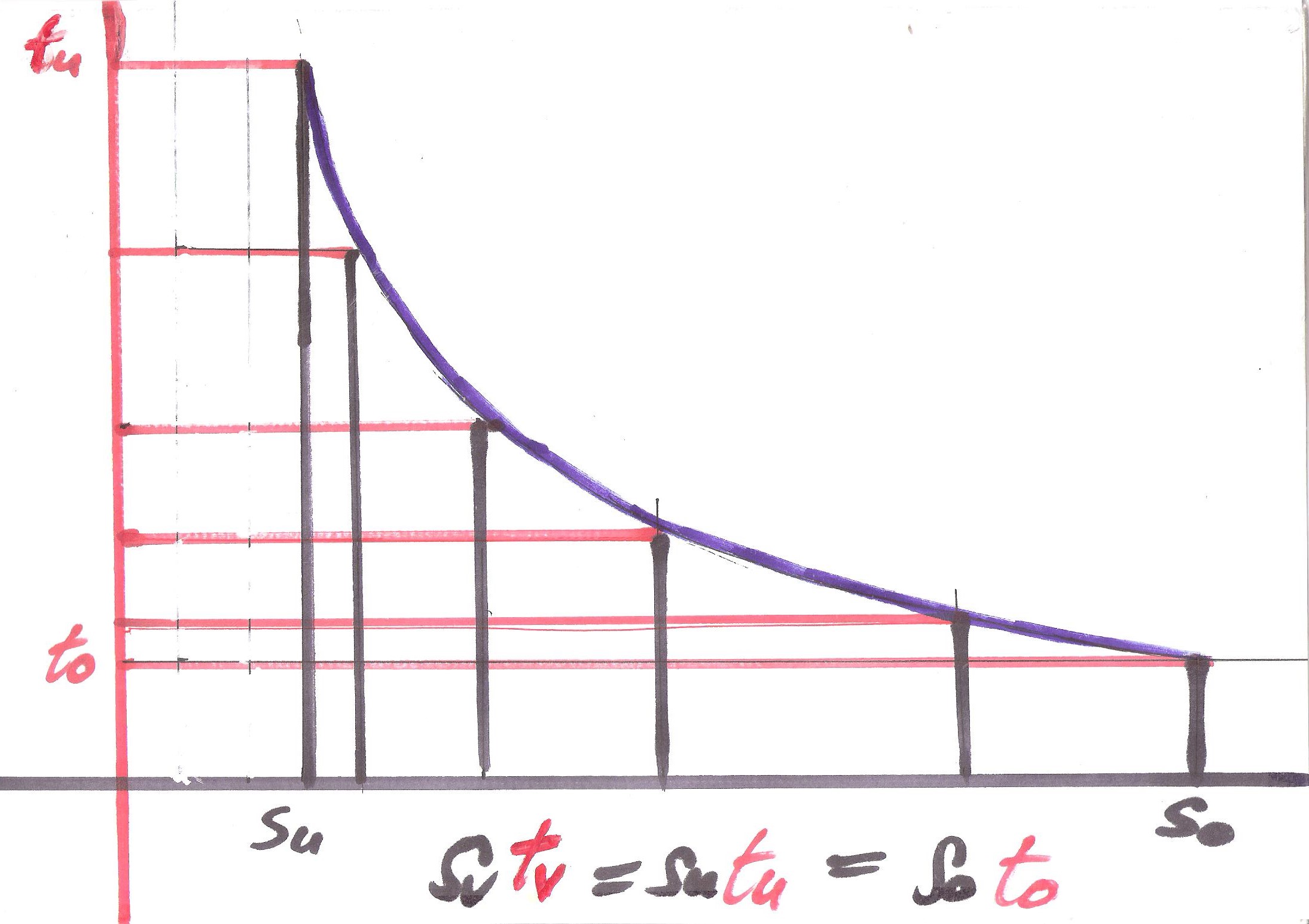
Any description of an Event Capsule which makes its spatial ‘spread’ v spaces and its temporal dimension one ksana is acceptable irrespective of the value of v which in the simplest case considered here must be a positive integer. We may equally well consider a pair of causally related ultimate events as stretching out over v individual grid-spaces, or alternatively as being confined to a single grid-space of dimension s0 (but the ‘length’ of a ksana will be different in the two descriptions). In the extreme case of the upper attainable limit of c* positions per ksana, we may either consider that we have a very extended spatial ‘spread’ of c* grid–positions with the distance between the emplacements contracted, or that we are dealing with a single Event-capsule of spatial dimension s0. The ‘occupied area’ will be the same because the time-length adapts accordingly, sv tv = constant.
This is very close to the normal Special Relativity treatment which analyzes relative motion in terms of fictitious ‘observers’. Were an observer travelling ‘on a light beam’, he or she would consider himself to be at rest and not notice anything untoward. But for an observer in a ‘stationary’ system, stationary relative to the light beam, things would be rather different and the spatial dimension of, say, a spaceship travelling near the speed of light, would appear contracted in the direction of motion (Note 5).
In UET, I attempt where possible to dispense with ‘observers’. I take a more realistic approach whereby the quantity and order of ultimate events within a particular region of the Event Locality is fixed, is ‘absolute’ if you like and not relative. Any way of adjusting the spatial and temporal inter-event distances is acceptable so long as the extent of the overall region, which reduced for simplicity to a Space/Time ‘Rectangle’, remains the same.
There is also one description of the total occupied region that takes precedence over all the others, namely the ‘Space/Time volume’ when v = 0 . This ‘default volume’ s03 t0 is what the occupied region actually is when there are no other event-chains in the neighbourhood : it is the ‘proper’ Space/Time volume because intrinsic to the specific events and the region they occupy. Such a realistic approach is not possible in physics as it is taught at present because in the latter the key notions of ‘ultimate event’ and ‘occurrence’, which are absolute notions, are absent. Einstein was very close to this viewpoint at one stage but then Minkowski muddled everything with his introduction of the idea of a ‘Space/Time Continuum’.
Now, when we have this same ‘rest capsule’ in an event environment that is not empty, not only are there alternative descriptions of the extent of the occupied region available but, rather more significantly, but there is interference from nearby event-chains (provided they are within causal range). This interference, the real possibility of ‘alternative viewpoints’, ma infests itself as a sort of tension within the ‘rest capsule’, a tension that depends on v. In the extreme case where v = c* , the tension within the single event capsule is the greatest possible : the capsule is, as it were, full to bursting. This is the UET reason why ‘particles’ forcefully resist any attempt to increase their speed relative to a stationary frame when we approach the upper limit ─ and we know that they do this because of numerous experiments (Note 6).
Problems with the time transformation
In my treatment there is not too much trouble with the spatial part. In effect, in UET, d′ cos φ = (d – vt) where v < c which is just another way of saying x′ = γ(x – vt) (Diagram). And, as in ‘normal’ physics, I am happy to take on board the ‘Independence of Axes Postulate’ (at least for the moment), i.e. y′ = y, z′ = z also.
So far, so good. Where I make things difficult for myself is by insisting that no actual event-chain has a ‘Space/Time Displacement Ratio’ of c exactly. The original reason for doing this was to avoid having to assume that ‘light’, or its equivalent, is ‘massless’, on the face of it a nonsense since I can’t really see how anything can be anything at all without having some mass (and anyway we know photons have gravitational mass since they are bent when they pass close to massive bodies).
There is thus a difference in UET between the lowest unattainable Space/Time Displacement Ratio, labelled c, and the highest attainable ratio which I label c*. For the simplest case, that of event-chains with a 1/1 Reappearance Rate, i.e. one ultimate event at each successive ksana, this would make
c* = (c –1) in ‘ultimate units’ ─ but for more complex cases c* can get a good deal closer to c.
I take time dilation to be a fact of life, or rather of the Event Locality. The extent of the time dilation depends entirely on the ratio of v to c which is a rational number (proper fraction or zero). The angle sin–1 v/c in effect gives both the space and time ‘settings’ for all systems of event-chains that have a constant displacement ratio of v relative to each other, i.e. a ratio of v grid spaces per ksana or, in ‘absolute units’, v s0 /t0 .
Note that the denominator in v/c is c and not c*. This is deliberate. Since v never actually attains c, the denominator in γ = 1/√1 – v2/c2 never risks becoming ‘infinite’, or, if you like, is always defined. And tan φ does not attain unity, i.e. φ < π/4 for all the cases we are considering.
The dual requirement in UET is to keep what I call the area of the ‘Space/Time Event Rectangle’ constant for all legitimate values of v, while not allowing the ratio of the sides to exceed c*.
The basic equation is sv tv = s0/t0 (the subscript v stands for ‘variable’) where s0 and t0 are constants, the spatial and temporal dimensions of a ‘rest event capsule’, i.e. when v = 0. (I am, of course, not considering the two other spatial dimensions but they will also be s0 for a ‘rest capsule’.)
To keep the overall area constant, we have to have the spatial and temporal ‘sides’ inversely proportional to each other. I define s0 to be a maximum and t0 to be a minimum. If we make tan β = s0/t0 , the ‘angle’ tan–1 s0/t0 is also a universal constant and crucial in defining any particular ‘universe’ (massive interrelated event cluster). I do not see how the value of tan β can be deduced a priori : its value in our part of the Locality will have to be determined by experiment.
For a given setting v/c (0 < v < c) the basic rectangle will deform, the spatial dimension contracting and the temporal expanding, but keeping the overall area constant. If we have sv = s0 cos φ and tv = t0/cos φ where sin φ = v/c this does the trick.
And, it has been argued in previous posts, the distance d of a spot from a repeating event when everything is at rest, will contract according to the formula d′ cos φ = (d – vt).
So the obvious way to keep the overall area constant in all eventualities is to make t′ = t/cos φ . So what happens to the ratio of one side to the other which, remember, must not ever exceed c*?
We have d′/t′ = (1/cos φ) (d – vt)
(1/cos φ) t
The 1/cos φ parts cancel out so we get
d′/t′ = (d – vt)/t = d/t – (vt)/t = d/t – v
This is OK, since if d/t ≤ c* , d′/t′ which is less then d/t will also not exceed the upper limit of c*.
However, we are not out of the woods yet. ‘Time’ is quantized in UET since there is no such thing as a ‘fraction’ of the ‘rest length’ of a ksana, t0 , a constant fixed once and for all (for any one ‘universe’). So everything has to be taken to the nearest integral value. Any distance d, the number of grid-spaces from a ‘stationary’ event-chain to a particular spot on the Locality, will not be ‘within causal range’ within the ‘space’ of a single ksana if it is c spaces away, or any number > c. So for such distances t must at least be 2 since no value of v, in effect no space contraction, is feasible in such a case. Of course, one could establish some sort of connection, or rather correlation, between arbitrarily distant spots on the Locality, but any such correlation would be entirely abstract if d ≥ c, in particular it cannot be a causal connection.
To find how many ksanas will be required for an event-chain with lateral displacement v spaces per ksana, we divide
d by v and make t the first integer ≥ d/v . For example, if we are looking at a spot c/2 spaces away, and an event-chain has a lateral displacement rate of c/4 s0/t0 only (c/2)/(c/4) = 2 ksanas will be required. In this case an event will occupy the exact spot but this will not normally happen. For v = (c/3) , straight division gives (c/2)/(c/3) = 3/2 which is not an acceptable value for t. We thus have to take the first integer > d/v which in this case is 2.
It is important to realize that, in UET, you cannot just have any old values for v, d and t : all such values are integral for the simplest event-chains which have a 1/1 Re-appearance Rate, and even those that do not, those which allow rational values of v, e.g. 7 spaces every 10 ksanas, never produce irrational values for v while d and t always remain integral.
Things become tricky when we consider a spot exactly c* or c spaces to the right. The distances are perfectly valid since the spots exist and we know the values we require for t in advance, namely a maximum value of 1 for the spot c* (corresponding to v = c*) and a value of 2 for the spot c since it is unattainable within a single ksana.
I have spent endless time messing around with the formula for t and the best I could come up with was the following,
t′ = (1/cos φ) (t – d/c) where t is the first integer > d/c and v < c
This works in most but not all cases. For example, what if d = c*? Since c*/c < 1 , we have t = 1 as required ─ the causal impulse reaches its goal in a single ksana. However, if we fit this into the formula for d′ we get
d′ = (1/cos φ) (d – vt) = (1/cos φ) (c* – c*) = 0
Now d′ cos φ is never zero : this would imply that the distances between possible distinct ultimate events is zero ─ so they would all be merged together, as it were. However, we can make some sense of this formula if we take it to mean that the distances between the emplacements, shrunk to their minimum size, is zero. And this minimum size is not zero but su (the subscript u for ‘ultimate’) and su = s0/c* a small but finite and hopefully one day measurable extent. This value su is the ‘ultimate’ spatial dimension : nothing smaller than this exists, or can exist, at any rate in our ‘universe’ (independent sub-region of the Locality).
It must be borne in mind that the area of the ‘occupied region’ continually adjusts itself, keeping always to integral ‘ultimate’ values much in the way that the pitch of an organ pipe or other blown instrument adjusts to keep the number of nodes of the sound waves integral ─ you cannot have √2 of a pipe length, for example. In extreme cases, such as c* we are obliged perforce to jettison the formulae based on the angle φ and simply state the spatial and temporal distances that we know must be right. If an ultimate event ‘goes the whole distance’ c* in a single bound, using its maximum possible displacement rate, we may imagine the original ‘rest capsule’ as being ‘filled to bursting’. Were there an ultimate event simultaneously at every possible emplacement, the ultimate events would be jammed forcibly together and, since each of them occupies a dimension su , and there are c* of them, we have no inter-event spatial distance left and no room for a possible extra event.
All this doubtless seems tortuous and needlessly complicated to the layman, while being utterly pointless to the traditional physicist who just aplies the SR formulae. But, to me, it is not a waste of space and time (sic) because this is actually the first important issue where I find UET diverges from Special Relativity. Why so? Because, as several readers will have noted, I do not end up with exactly the Einstein/Lorentz Transformation for time. In the latter we have, using my notation,
t′ = (1/cos φ)(t – (sin φ)d/c) or, as you will find it written in textbooks t′ = γ(t – (vx/c2)) γ = 1/√1 – v2/c2
The extra factor of v/c = sin φ is required if we wish to make d′/t′ exactly equal to c whenever d/t = c. This extra factor is redundantin my treatment since I am stipulating in advance that v < c and I only need to guarantee that d′/t′ ≤ c when d/t ≤ c not that d′/t′ = c exactly. Whether any experiment will differentiate the two treatments at such a precise level remains to be seen.
Ultimate Values for the Space/Time Rectangle
As I cannot state too often, everything in UET is quantized and the basic ‘quanta’ of space and time have fixed extent that hopefully we will soon be able to determine experimentally within certain limits.
So is there a final shape for the ‘Space/Time Rectangle’, one that cannot be exceeded if we are dealing with a causal process? Yes. As stipulated, for a 1/1 reappearance rate (one ultimate event per ksana), this makes c* , the greatest lateral displacement rate, equal to (c – 1). For any such event-chain, we end up with a grotesquely deformed ‘Space/Time Rectangle’ with a minimal spatial length and a maximum ‘time-length’. If we plug the value v = (c–1) into the formula for γ we obtain
1/√(1 – (c–1)2/c2 = c/√c2 – (c–1)2 = c/√(2c –1) ≈ c/√2c = √c/2
I do not know whether this value has any physical significance or utility, but I note it anyway.
If an ultimate event only reappears once every m ksanas, while it displaces itself mc* at each appearance, it will have the same ‘Space/Time Displacement Rate’ of mc*/mc* = m/m = 1 but it will miss out many more positions. And if has a displacement rate of n/m this makes γ =
1/√(1 – ((n/m)c)2/c2 = c/√c2 – (n/m)2 c2 = c/√c2(1 –(n/m)2)
= (1/√1 – n2/m2) > 1
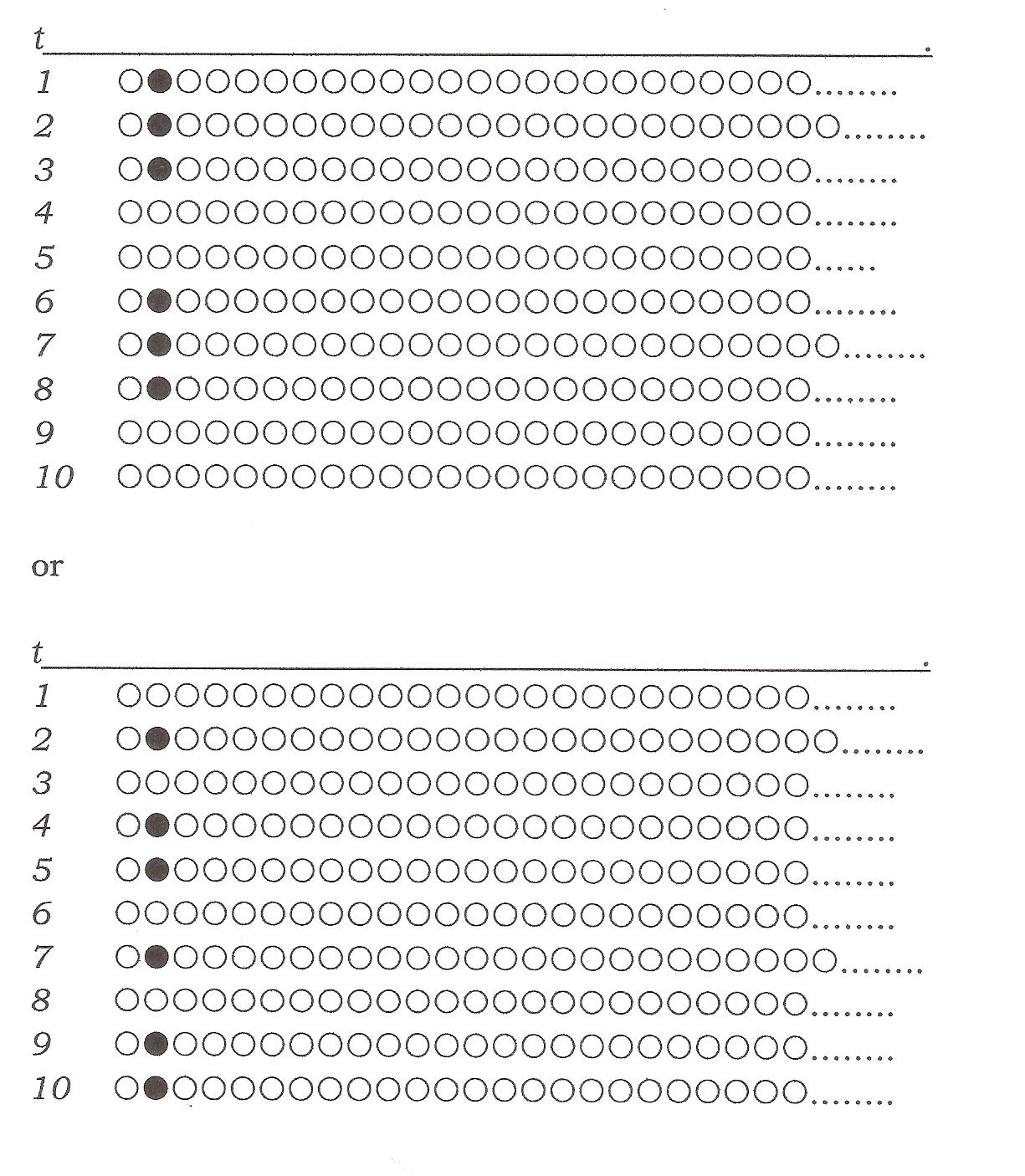
There may, thus, in UET be all kinds of event-chains that have the same displacement rate (though different reappearance rates) and a great variety of possible event-chains with a great many gaps between successive events (n/m < 1) that come close to the maximum attainable value.
On the other hand, reappearance rates cannot be stretched indefinitely ─ nothing is infinite in UET ─ there will be a maximum possible gap between two successive appearances, probably one involving c or c*.
The dimensions of the ‘ultimate’ Space/Time Rectangle should, however, be calculated, not according to the γ formula which breaks down at or near the upper limit, but simply according to the fixed dimensions of the original rest’ capsule s0 by t0. If there are c* simultaneous ultimate events, and this is the absolute limit, the events occupy (or could occupy) the whole of one dimension of the ‘rest capsule’ which has a fixed volume of s03 where so is a maximum. Now each ‘event kernel’, the exact region where an ultimate event has occurrence has a small but non-zero size which may be noted as su3. Since there are, in the extreme case, c* = (c –1) ultimate events, or emplacements for possible ultimate events, we have so = c su.
What of time? To keep the overall area constant, time has to be stretched to a maximum, or, rather, the gap between two successive ultimate events is the largest possible. Since sv tv = s0 t0 = constant , this means that tmax, or as it is usually written tu , = c* t0. .
This maximum time dilation should be observable when a ‘particle’ (event-chain) approaches the upper limit. Moreover, no matter what, this maximum time-length can never be exceeded ─ we will not get the ludicrous scenario of the ‘time interval ’ between two screams of someone falling into a black hole becoming infinite.
Deductions and Predictions
The UET treatment differs from that of SR on several points. The most important being that Different event-chains can have the same maximum displacement ratio. They will differ amongst themselves by the number of spots on the Locality that are missed out, as it were.
A corollary of the above is that different event-chains with the same displacement ratio can have very different ‘penetration’ when confronted with massive event-clusters that block their path. This is the suggested explanation for the known fact that neutrinos are almost impossible to stop, thus to detect : they must have a very ‘open’ reappearance rate while also a displacement rate comparable to that of light (and possibly exceeding it). There seems no reason a priori to assume that the electro-magnetic event-chain is the only event-chain to attain the maximum and it seems to me quite possible that the neutrino, or some other particle, chain is ‘faster’. In UET it might just be possible to “send messages faster than the speed of light” but, certainly, it would not be possible to send them faster than the maximum possible displacement rate for all causal event-chains. There is so much fuss about ‘sending messages’ through empty space only because messaging is a causal process.
Beyond the speed limit?
What would/could happen if we carried on accelerating a ‘particle’ (event-chain) beyond the maximum, just supposing for a moment that this is technically feasible? According to Einstein, this is not possible because the mass of a particle “becomes infinite” as it approaches the limit ─ though photons regularly travel at this speed. I can only guess what would happen within the context of UET but my guess is that the event-chain in question would simply terminate : to all intents and purposes the ‘particle’ would simply “disappear into thin air” without leaving a trace. There would be no Space/Time explosion, nothing dramatic like that. Would there be any compensatory creation of new particles (event-chains)? One could argue that a certain amount of ‘existence energy’ has been ‘released’ and thus has become available for other purposes. I, however, think it more likely that there would be no new production of events : the chain would terminate and that is that. This is, of course, the worst heresy since it is contrary to the dogma of the Conservation of Mass/Energy. To accelerate anything to this enormous speed (relative to a stationary event-chain) is likely to be a rare event, so the possibility of the violation of energy conservation would not make too much difference in the short run. I think it very likely that the ‘disappearance’ of event-chains has already been observed in CERN and other accelerators, and has either been dismissed as “experimental error” or not mentioned because too controversial. If and when the possibility of the sudden termination of event-chains, i.e. sudden apparent disappearance of particles without any observed consequence, becomes theoretically acceptable, you will probably see several experimentalists publishing results stashed away in bottom drawers at present, results that show just this happening.
NOTES
Note 1 “He [Einstein] asked himself what would be the consequences of his being able to move with the speed of light. This question, innocent as it appears, eventually brought him into conflicts and contradiction of enormous depth within the foundations of physics.” Jeremy Bernstein, Einstein
Note 2 I have suggested elsewhere that what we really need is a three-dimensional lattice which flashes on and off rhythmically and a a spurt of differently coloured light marking an event, and ‘over time’ an event-chain.
Note 3 This sort of problem comes up all the time in physics and was probably the motivation for Descartes invention of the coordinate system (or something very much like it) in the first place. The Greeks did not have a coordinate system : it would be interesting to know what sort of ‘localization system’ they used in daily life to locate, say, a particular house in Alexandria.
Note 4 The argument goes something like this.
Suppose that the transformation formulae were not linear, for example that x′ = Ax – Bt2
Then x′ = 0 marks the position of the origin of the ‘moving’ system ∑′ which gives
0 = Ax – Bt2 or x = (B/A) t2
However, we have already decided we are dealing with a case of constant relative motion of the two systems so x/t ought to be some constant, probably involving v, but not t. But in the above x/t = (B/A)t and (B/A)t is not a constant function (since t appears on the R.H.S.) and any graph of x against t will not be a straight line ─ it will, in the above case, be a parabola. Thus contradiction.
Incidentally, it does not matter whether we write
x′ = Ax + Bt or x′ = Ax – Bt since we can make B positive or negative as required by the situation. All that matters is the relative motion of the two systems irrespective of direction.
Note 5 There is some doubt about what a hypothetical observer would actually ‘see’ (a fortiori what his brain would tell him he is ‘seeing’). According to current physics, photons from a ‘moving’ object leave that object at different times, and ones from parts further away will take longer to impinge on the eye than others. On would not see a ‘moving’ cube ‘face on’ but as if it were slightly rotated thus allowing a little of one side to be visible. The general conclusion seems to be the general case one would see the shape of a moving object rotated but otherwise undisturbed; the colour and brightness of the object would also change because of aberration and Doppler shift. See the discussion “The Visual Appearance of Moving Objects in Rosser, Introductory Relativity pp. 104-107.
Note 6 For example the experiments carried out by Berozzi on electrons. They decisively show that (v/c)2 flattens off dramatically for kinetic energies approaching as v approaches c, whereas, for small speeds, the predictions of Einstein coincide with those of Newtonian Mechanics.